A sensor-service collaboration approach for target tracking in wireless camera networks

PubDate: August 2017
Teams: Beijing University of Posts and Telecommunications;China Mobile Information Security Center
Writers: Shuai Zhao ; Le Yu
PDF: A sensor-service collaboration approach for target tracking in wireless camera networks

Abstract
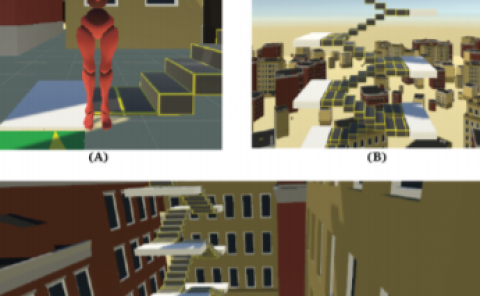
Mobile target tracking is a necessary function of some emerging application domains, such as virtual reality, smart home and intelligent healthcare. However, existing portable devices for target tracking are resource intensive and high-cost. Camera tracking is an effective location tracking way for those emerging applications which can reuse the existing ubiquitous video monitoring system. This paper proposes a dynamic community-based camera collaboration (D3C) framework for target location and tracking. The contributions of D3C mainly include that (1) nonlinear perspective projection model is selected as the camera sensing model and sequential Monte Carlo is employed to predict the target location; (2) a dynamic collaboration scheme is proposed, it is based on the local community-detection theory deriving from social network analysis. The performance of proposed approach is validated by both synthetic datasets and real-world application. The experiment results show that D3C meets the versatility, real-time and fault tolerance requirements of target tracking applications.