Haptics and virtual reality based bilateral telemanipulation of miniature aerial vehicle over open communication network

PubDate: August 2017
Teams: Khalifa University of Science and Technology;Biomedical Engineering and BioRobotics Institute
Writers: Shafiqul Islam ; Dongming Gan ; Reem Ashour ; Paolo Dario ; Jorge Dias ; Lakmal D. Seneviratne
Abstract
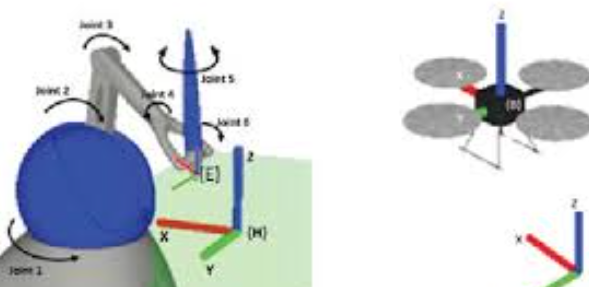
In this paper, we develop haptic interface system for bilateral telemanipulation of unmanned miniature aerial vehicle (MAV). The proposed interface allows operator to navigate MAV in order to control and interact with uncertain indoor flying environments without using vision systems. The master interface combines bilateral shared control terms with the reflected remote interaction force fields mapped by two different types of force field algorithms as potential force field and spring-damper force field. The shared control strategy for the master comprises velocity signals of the remote MAV with the scaled position of the master haptic manipulator. The bilateral shared input interface for the slave is designed by combining scaled position of the master manipulator with the velocity of the remote MAV. The data transmission between ground station and remote vehicle are carried out by open internet communication network. In contrast with other haptic interface system, the proposed interface system only uses laser technology equipped with the slave MAV. Compared with potential force field based interface, the interface introduced in this paper provides better situational awareness about remote environment helping operator to navigate and control MAV for safe interaction with uncertain indoor dynamic environment. Experimental results together with comparative studies on laboratory made quadrotor MAV are presented to demonstrate the effectiveness of the proposed methods for real-time applications.