A Robust Balance Strategy Applied to Real-Time Animation Data with Kinect Sensor

PubDate: November 2017
Teams: Universidade Federal do Ceara
Writers: Danilo B. da Silva ; Creto Augusto Vidal ; Joaquim Bento Cavalcante-Neto ; Italo N.S. Pessoa ; Rubens Fernandes Nunes
PDF: A Robust Balance Strategy Applied to Real-Time Animation Data with Kinect Sensor
Abstract
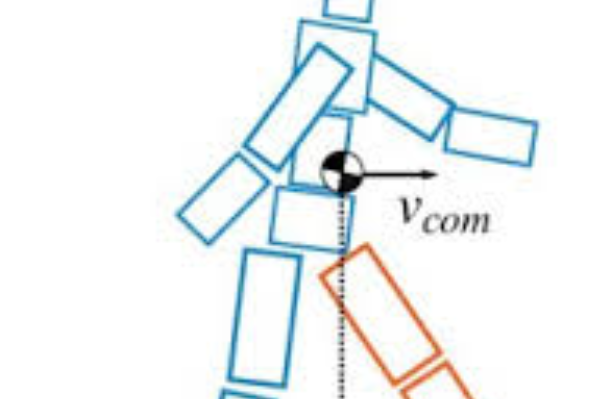
The hardware evolution had promoted amazing possibilities of interaction in virtual environments, attracting a lot of research in the most diverse fields, especially in games. In this work, we explore the animation data captured by Microsoft Kinect in real-time for developing user interaction in a virtual simulated environment. We use physically based characters with balance treatment and proportional-derivative controllers to track the user’s reference joints, making use of internal torques. For this, we show a strategy of contact that allows great stability for the character with artificial torques to the standing foot, and a policy of support changes that have three elements: the feet’ positions from Kinect data, the support configuration of the virtual character and a virtual step strategy inspired by SIMBICON (Simple Biped Locomotion Control). As results, we expose the controller’s abilities and interactivity in real-time without use of optimization or inverse dynamics.
