A Low-Cost Drift-Free Optical-Inertial Hybrid Motion Capture System for High-Precision Human Pose Detection

PubDate: January 2020
Teams: Beijing Institute of Technology
Writers: Yue Li; Dongdong Weng; Dong Li; Yihan Wang
Abstract
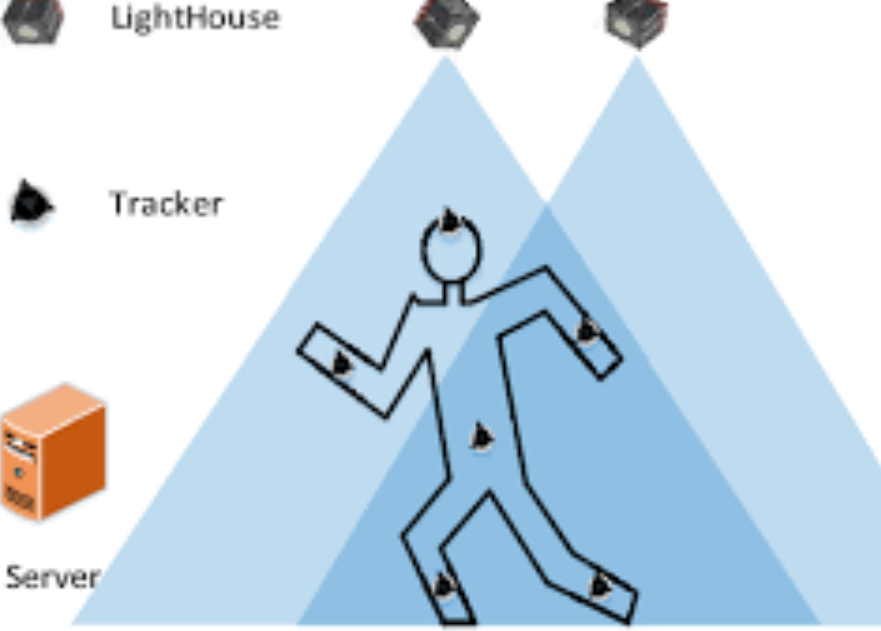
This paper proposes a feasible and low-cost solution for designing optical-inertial hybrid motion capture systems by integrating two subsystems: the inertial subsystem and the optical subsystem. We calibrate the relative pose of the optical sensor module and the human joint to establish the transformation between the joint parameters and the optical sensor data, so that the data fusion can be performed under the same reference frame. To construct the above motion capture system, an optical-inertial data fusion scheme is proposed, which leverages the optical data of key nodes of the human body to correct the inertial data with accumulated errors. The proposed system can support long-term drift-free operation with a low-cost hardware setup, avoiding the drift problem of the inertial motion capture system. Simulation experiments have shown that optical data can reduce the drift error to the centimeter level. The practical experiment shows that the virtual character can complete the loop detection after the inertial position is corrected by the optical data. Our motion capture system outputs standard motion capture data, which can be directly imported into engines such as Unity3D and Unreal.

