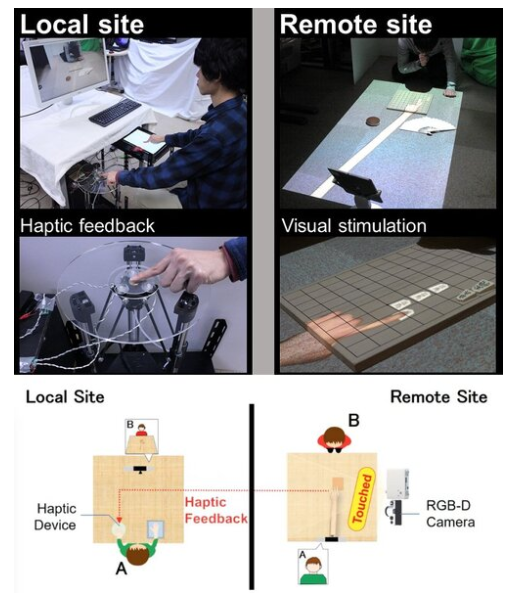
fARFEEL: Providing Haptic Sensation of Touched Objects using Visuo-Haptic Feedback

Title: fARFEEL: Providing Haptic Sensation of Touched Objects using Visuo-Haptic Feedback
Teams: Osaka University
Writers: Naruki Tanabe ; Yushi Sato ; Kohei Morita ; Michiya Inagaki ; Yuichi Fujino ; Parinya Punpongsanon ; Haruka Matsukura ; Daisuke Iwai; Kosuke Sato
Publication date: March 2019
Abstract
We present fARFEEL, a remote communication system that provides visuo-haptic feedback allows a local user to feel touching distant objects. The system allows the local and remote users to communicate by using the projected virtual hand (VH) for the agency of his/her own hands. The necessary haptic information is provided to the non-manipulating hand of the local user that does not bother the manipulation of the projected VH. We also introduce the possible visual stimulus that could potentially provide the sense of the body ownership over the projected VH.