Six-DoF pose estimation using dual-axis rotating laser sweeps using a probabilistic framework

PubDate: November 2017
Teams: University of Antwerp
Writers: Dennis Laurijssen; Steven Truijen; Wim Saeys; Walter Daems; Jan Steckel
PDF: Six-DoF pose estimation using dual-axis rotating laser sweeps using a probabilistic framework
Abstract
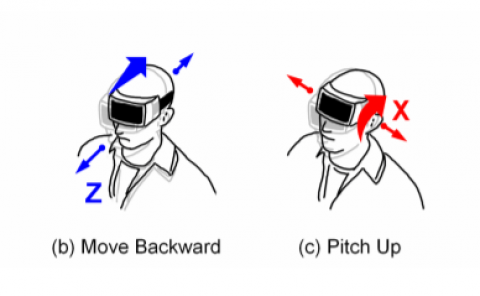
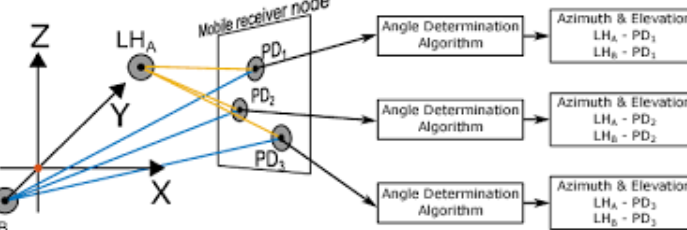
Pose estimation systems have seen some big developments in the last two decades due to technological advances and a greater need for these systems. The industry that thrives and simultaneously popularizes these developments is the entertainment industry. One of the latest developments in home entertainment are Virtual Reality systems that lets users have an immersive experience when playing video games. In order to fully achieve this immersive experience, objects in the real world' can be used to manipulate objects in the virtual world. Therefore thereal world’ objects need to be located in the user’s environment to a great extent. One of these virtual reality kits utilizes an optical solution that incorporates dual-axis rotating laser sweeps on the transmitter side and photodiodes on the receiver side to achieve the positioning of these objects. Since the transmitters are stand-alone systems that can be purchased at a relatively low price, we propose to use this hardware in combination with custom low-cost receiver hardware to achieve an affordable yet precise and accurate six degrees-of-freedom human body pose estimation system.