Rendering Stiff Virtual Walls Using Model Matching Based Haptic Controller

PubDate: January 2019
Teams: Indian Institute of Technology Bombay
Writers: Indrajit Desai; Abhishek Gupta; Debraj Chakraborty
PDF: Rendering Stiff Virtual Walls Using Model Matching Based Haptic Controller
Abstract
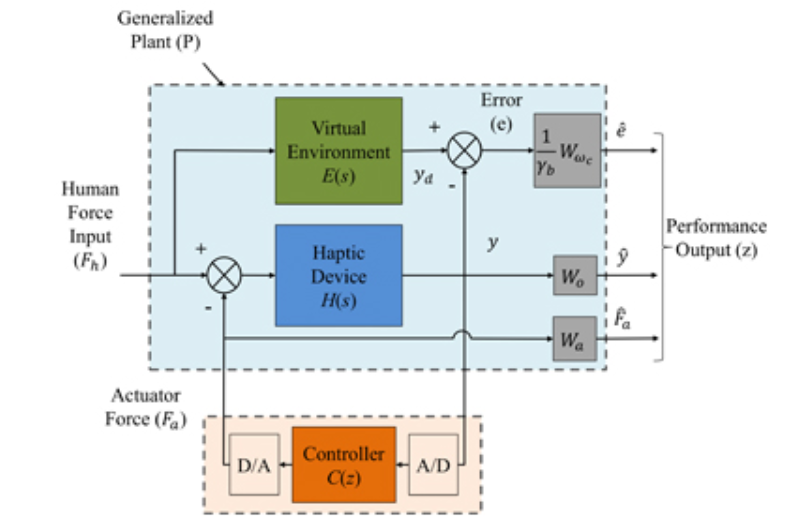
This paper presents a model matching framework for design of haptic controllers. The controller design problem is formulated as a sequence of H ∞ optimization problems in order to achieve maximal transparency bandwidth. This enables automatic synthesis of robust controllers to achieve a desired bandwidth while limiting actuator forces and guaranteeing stability. This method is applied to address the problem of accurate rendering of high-stiffness virtual walls. Simulation of virtual walls of various stiffnesses are tested on a PHANToM Premium 1.5, at a sampling rate of 1 KHz. The sampled nature of the interface, sensor quantization and Coulomb friction impose limits on the maximum stiffness that can be stably achieved with the commonly used open loop impedance controller. Results presented here demonstrate that the proposed controllers can be used to accurately render virtual walls with stiffness up to 5000 N/m in an oscillation free manner. This stiffness value is well beyond stability limits for the PHANToM under open loop impedance control. Relationships between the weighting functions and the transparency bandwidth are established to outline a procedure for selection and tuning of the weighting functions. Specifically, it is shown that through appropriate choice of weighting functions high-frequency oscillations observed during rendering of stiff surfaces can be eliminated. The passivity of the designed controllers over the frequency range of operation is verified.