Fingertip Tactile Devices for Virtual Object Manipulation and Exploration

Title: Fingertip Tactile Devices for Virtual Object Manipulation and Exploration
Teams: Stanford University
Writers: Samuel B. Schorr; Allison Okamura
Publication date: May 2017
Abstract
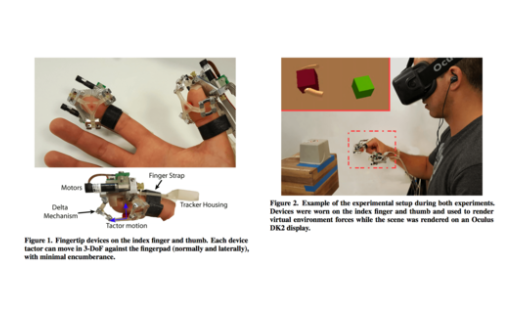
One of the main barriers to immersivity during object manipulation in virtual reality is the lack of realistic haptic feedback. Our goal is to convey compelling interactions with virtual objects, such as grasping, squeezing, pressing, lifting, and stroking, without requiring a bulky, world-grounded kinesthetic feedback device (traditional haptics) or the use of predetermined passive objects (haptic retargeting). To achieve this, we use a pair of finger-mounted haptic feedback devices that deform the skin on the fingertips to convey cutaneous force information from object manipulation. We show that users can perceive differences in virtual object weight and that they apply increasing grasp forces when lifting virtual objects as rendered mass is increased. Moreover, we show how naive users perceive changes of a virtual object’s physical properties when we use skin deformation to render objects with varying mass, friction, and stiffness. These studies demonstrate that fingertip skin deformation devices can provide a compelling haptic experience appropriate for virtual reality scenarios involving object manipulation.