HexTouch: Affective Robot Touch for Complementary Interactions to Companion Agents in Virtual Reality

PubDate: November 2020
Teams: Parsons School of Design;
Writers: Ran Zhou;Yanzhe Wu;Harpreet Sareen
Abstract
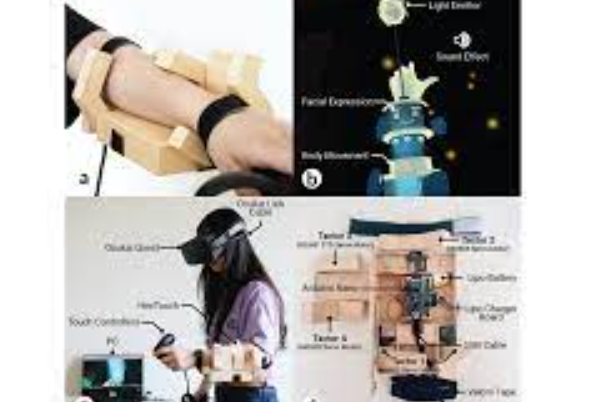
There is a growing need for social interaction in Virtual Reality (VR). Current social VR applications enable human-agent or interpersonal communication, usually by means of visual and audio cues. Touch, which is also an essential method for affective communication, has not received as much attention. To address this, we introduce HexTouch, a forearm-mounted robot that performs touch behaviors in sync with the behaviors of a companion agent, to complement visual and auditory feedback in virtual reality. The robot consists of four robotic tactors driven by servo motors, which render specific tactile patterns to communicate primary emotions (fear, happiness, disgust, anger, and sympathy). We demonstrate HexTouch through a VR game with physical-virtual agent interactions that facilitate the player-companion relationship and increase the immersion of the VR experience. The player will receive affective haptic cues while collaborating with the agent to complete the mission in the game. The multisensory system for affective communication also has the potential to enhance sociality in the virtual world.