HDR Environment Map Estimation for Real-Time Augmented Reality

PubDate: Nov 2020
Teams: Apple
Writers: Gowri Somanath, Daniel Kurz
PDF: HDR Environment Map Estimation for Real-Time Augmented Reality
Abstract
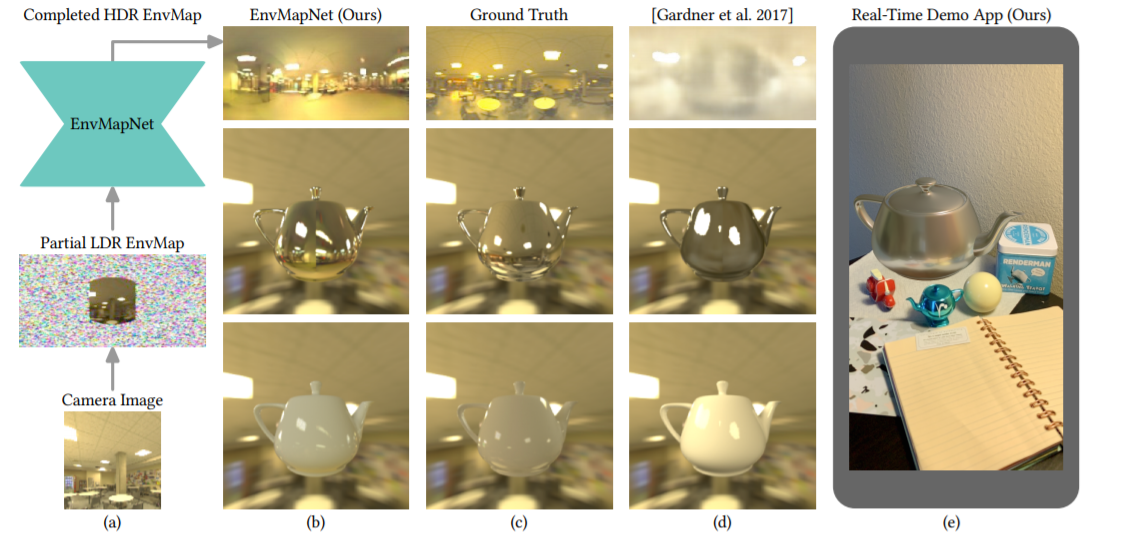
We present a method to estimate an HDR environment map from a narrow field-of-view LDR camera image in real-time. This enables perceptually appealing reflections and shading on virtual objects of any material finish, from mirror to diffuse, rendered into a real physical environment using augmented reality. Our method is based on our efficient convolutional neural network architecture, EnvMapNet, trained end-to-end with two novel losses, ProjectionLoss for the generated image, and ClusterLoss for adversarial training. Through qualitative and quantitative comparison to state-of-the-art methods, we demonstrate that our algorithm reduces the directional error of estimated light sources by more than 50%, and achieves 3.7 times lower Frechet Inception Distance (FID). We further showcase a mobile application that is able to run our neural network model in under 9 ms on an iPhone XS, and render in real-time, visually coherent virtual objects in previously unseen real-world environments.