Analysis of Effective Impedance Transmitted to the Operator in Position-Exchange Bilateral Teleoperation

Title: Analysis of Effective Impedance Transmitted to the Operator in Position-Exchange Bilateral Teleoperation
Teams: Facebook
Writers: Nick Colonnese, Allison M. Okamura
Publication date: June 6, 2017
Abstract
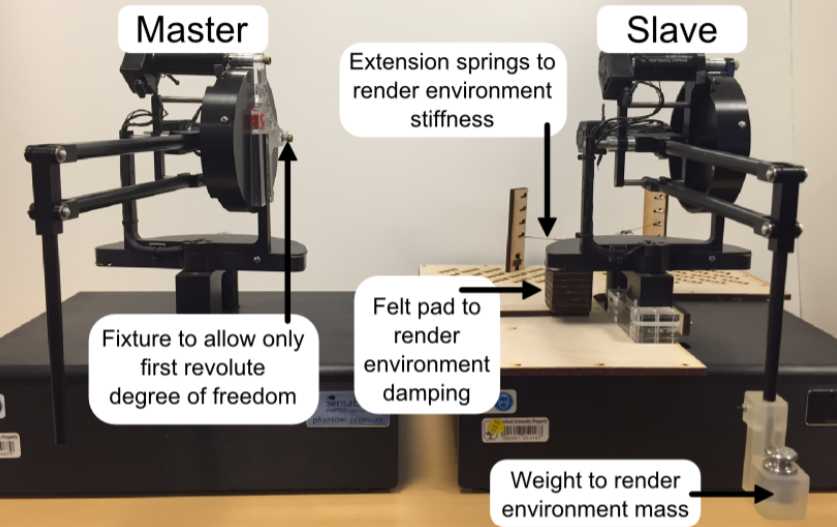
In this paper, we analyze the impedance transmitted to the operator in bilateral teleoperation including the effects of master and slave dynamics, local and communication time delay, low-pass filtering of the velocity estimate, and controller stiffness and damping, for three different environment dynamics: free, clamped, and a mass-damper-spring. We show the impedance transmitted the operator numerically using effective impedances, a conceptual tool that decomposes the impedance into components with physical analogs, and also present symbolic expressions for the effective stiffness and damping transmitted to the operator at low frequencies. Our results show that local and communication time delay do not significantly affect the effective stiffness, strongly affect effective damping, and weakly affect effective mass transmitted to the operator. The low-pass filter cut-off frequency affects the impedance transmitted to the operator differently depending on the environment impedance. For many cases, increasing the cutoff frequency primarily increases the effective damping bandwidth. Increasing controller stiffness increases the effective stiffness transmitted to the operator at low frequencies, but can significantly change the effective stiffness, damping, and mass, at higher frequencies. Experimental data gathered using a bilateral telemanipulator consisting of two Phantom Premium 1.5 robots interacting with a custom-made environment validates the theoretical analysis.