Fast Hand-Object Interaction Using Gesture Guide Optimization

PubDate: May 2020
Teams: Beihang University
Writers: Yunlong Che; Yue Qi
PDF: Fast Hand-Object Interaction Using Gesture Guide Optimization

Abstract
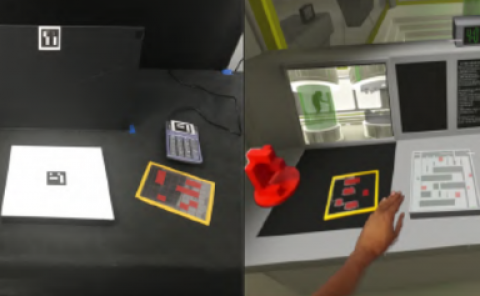
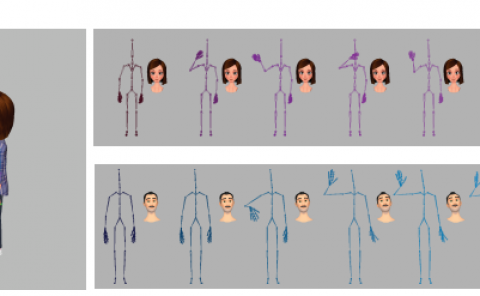
In this paper, we present a fast approach to model the interactions between the human hand with virtual objects. Given a detailed hand model, we adopt a gesture guided optimization to find the stable poses for manipulating the virtual object. During this process, we identify user’s gesture with predefined proposition-based descriptions script and re-tracked hand pose, then generate the contact points using the gesture prior. Begin with these points, we compute the stable pose for interaction and then obtain plausible looking motion. In practice, our real-time algorithm can perform common manipulation in less than 20 ms (run on a single CPU) with virtual objects.