Interactive Soft Pnuematic Actuator Skin for Tactile Feedback

Title: Interactive Soft Pnuematic Actuator Skin for Tactile Feedback
Teams: EPFL
Writers: Jamie Paik1 Matthew Robertson1
Publication date: Apr, 2018
Abstract
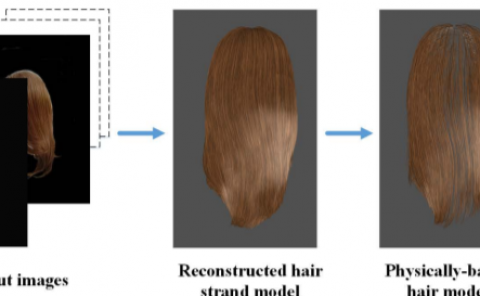
The latest virtual reality (VR) and augmented reality (AR) systems rely heavily on visual feedback while the “physical reality”, haptic interfaces still lack the rich variety of feedback necessary to render an effective exteroceptive understanding of the environment. Because there is no haptic platform that can fully stimulate the skin in terms of all four mechanoreceptor modules (pressure, vibration, temperature, and stretch), we have yet to realize the potential of true and immersive communication beyond 3D glasses. To achieve this, we need 1) a modular physical haptic interface that 2) activates different tactile modalities upon command 3) over a distributed area. The soft pneumatic actuator (SPA) skin transfers novel tactile sensations of an environment/object via multiple modes of stimulation tackling deeper tactile perception. Designed as a wearable device, SPA-skin will be an independent module that is ready to be worn as a sleeve or placed in existing clothing items. For example, with the SPA-skin platform, you will be able to communicate via virtual pokes, pat on a back, tickles, rubs, pinches, as well as to receive directional guides and instructions via physical sensation.
The goal of SPA-skin is to create the physical platform consisting of actuators in a quasi-2D composite surface, to control methodologies for distributed sensing and actuation, and to demonstrate the efficacy of the communication on personal devices and various VR and AR tasks. SPA-skin as a wearable platform demands a comprehensive solution in actuation, electronics and manufacturing to transfer the “touch” experience which opens up new horizons in haptic research, and soft wearable robotics. This research requires expertise at the frontier and intersection of robotics, mechanical engineering, materials science, electronics packaging, system integration, and human-machine interface.
In the talk, I will be presenting a wearable SPA-skin interface for communications. This SPA has a multi-DoF grid of actuation points that delivers rich tactile sensations driven with closed-loop control for highly interactive and quantifiable interaction with its wearer.