Real Walking in Place: HEX-CORE-PROTOTYPE Omnidirectional Treadmill

PubDate: May 2020
Teams: Southeast University
Writers: Ziyao Wang; Haikun Wei; KanJian Zhang; Liping Xie
PDF: Real Walking in Place: HEX-CORE-PROTOTYPE Omnidirectional Treadmill
Abstract
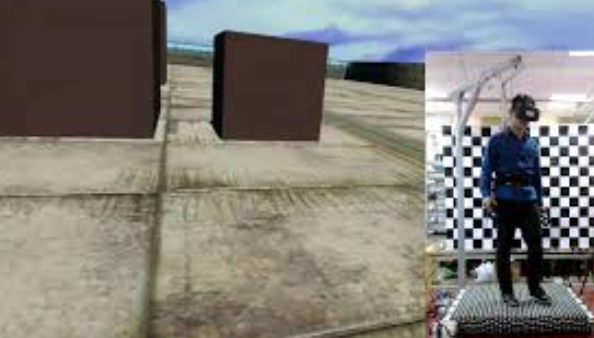
Locomotion is one of the most important problems in virtual reality. Real walking experience is the key to immersively explore the virtual world. Several strategies have been proposed to solve the problem, but most are not suitable to solve the locomotion problem in Room-Scale VR. The omnidirectional treadmill is an effective way to provide a natural walking experience within the Room-Scale VR. This paper proposes a novel omnidirectional treadmill named HEX-CORE-PROTOTYPE (HCP). The principle of synthesis and decomposition of velocity is applied to form an omnidirectional velocity field. Our system could provide a full degree of freedom and real walking experience in place. Compared to the current best system, the height of HCP is only 40% of it. The application shows the effectiveness of our system to solve the locomotion problem in Room-Scale VR.