Utilizing Multiple Calibrated IMUs for Enhanced Mixed Reality Tracking

PubDate: January 2020
Teams: Technical University of Munich
Writers: Adnane Jadid; Linda Rudolph; Frieder Pankratz; Gudrun Klinker
PDF: Utilizing Multiple Calibrated IMUs for Enhanced Mixed Reality Tracking
Abstract
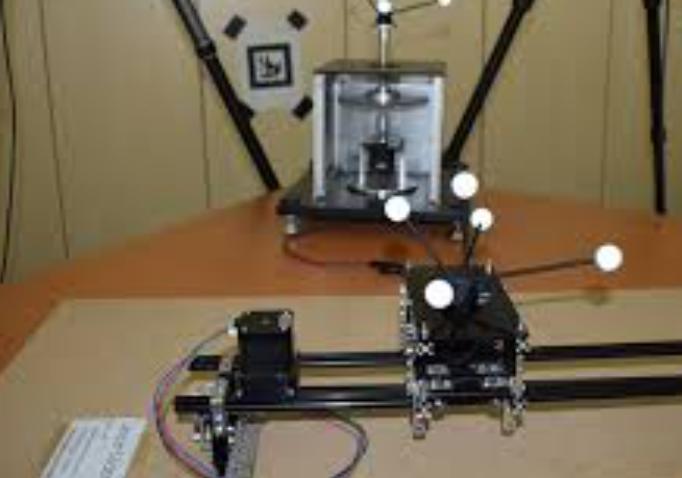
Low-cost mobile mixed reality solutions for head tracking, as well as tracking of interaction targets, can be enhanced by multiple inertial measurement units (IMUs). Since microelectro-mechanical systems (MEMS) were introduced, IMUs have become smaller, they need less power and cost less. Yet, as any sensor, IMUs produce sensor error and mitigate the accuracy of the tracking system. This is particularly the case for low-cost IMUs. In this poster, we investigate whether the joint use of three IMUs can reduce the overall error. We present a solution fusing three independently calibrated low-cost IMUs on a planar and non-planar grid. We show that we can achieve the tracking quality of a single high-cost IMU this way. For the comparison, we offer several one Degree of Freedom measurement setups for mechanical rotation and translation movements. Afterwards, we discuss some concepts towards designing non-planar arrangements of Multi-IMUs in a Grid that may be suitable for HMD tracking.
