Obstacles Awareness Methods from Occupancy Map for Free Walking in VR

PubDate: August 2019
Teams: GFI Informatique
Writers: Marilyn Keller; Tristan Tchilinguirian
PDF: Obstacles Awareness Methods from Occupancy Map for Free Walking in VR
Abstract
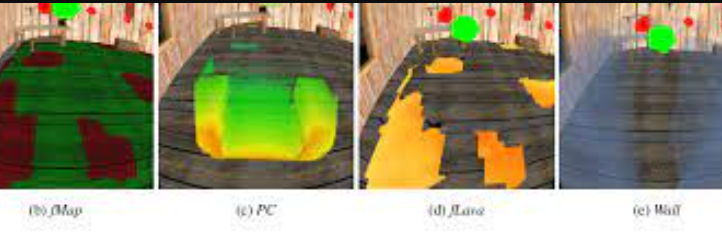
With Head Mounted Displays (HMD) equipped with extended tracking features, users can now walk in a room scale space while being immersed in a virtual world. However, to fully exploit this feature and enable free-walking, these devices still require a large physical space, cleared of obstacles. This is an essential requirement that not any user can meet, especially at home, thus this constraint limits the use of free-walking in Virtual Reality (VR) applications. In this poster, we propose ways of representing the physical obstacles surrounding the user. There are generated from an occupancy map and compared to the representation as a point cloud. We propose three visualisation modes: integrating an occupancy map into the virtual floor, generating lava lakes where obstacles are and building a semi-transparent wall along the obstacles boundaries. We found that although showing the obstacles on the floor only impacts lightly the navigation, the preferred visualization mode remains the point cloud.