Usage of tactile feedback to assist cooperative object manipulations in virtual environments

PubDate: December 2017
Teams: Virtual Reality Group-PUCRS
Writers: Thomas Volpato de Oliveira; Márcio Sarroglia Pinho
PDF: Usage of tactile feedback to assist cooperative object manipulations in virtual environments
Abstract
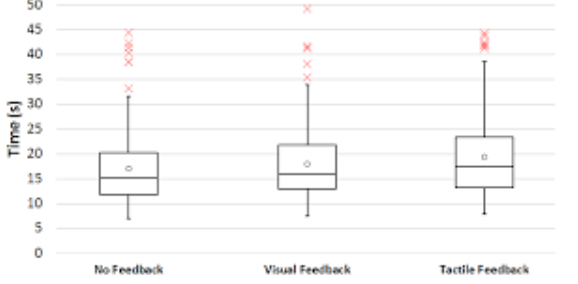
This study evaluates the usage of tactile feedback to aid cooperative object manipulation using the SkeweR technique. This technique is based on the use of crushing points, where the users grab the object for the first time, to simultaneously move/rotate an object. Once the user keeps his hand positioned on the crushing point, during the object manipulation, the interaction becomes more natural, in the sense that it is more similar to the real process. However, due to the lack of any physical constraint to the users’ movements, it is often noticed that the user’s hand moves apart from the crushing point during the interaction. To solve this problem, this work proposes the usage of tactile feedback to inform the user about the distance of his hand from the crushing point. The tactile feedback is provided by a vibration micromotor attached to the users’ thumb. To validate our method, we ran a user study based on the 3D manipulation of a virtual object, which has to be translated and rotated through a virtual path along a virtual wire, from the beginning to the end of it. During the interaction, users manipulate a 3DOF position tracker and should keep this tracker at the same position of the crushing point. During the trials, the participants used three modalities of interaction: without any feedback, with a visual feedback and with tactile feedback. Results showed that the users kept the tracker closer to the crushing point when using tactile feedback.