Achieving High Stiffness Range of Force Feedback Gloves using Variable Stiffness Mechanism

PubDate: August 2019
Teams: Beihang University;University of Auckland
Writers: Yuan Guo; Dangxiao Wang; Ziqi Wang; Xiuping Yang; Haitong Wang; Yuru Zhang; Weiliang Xu
PDF: Achieving High Stiffness Range of Force Feedback Gloves using Variable Stiffness Mechanism
Abstract
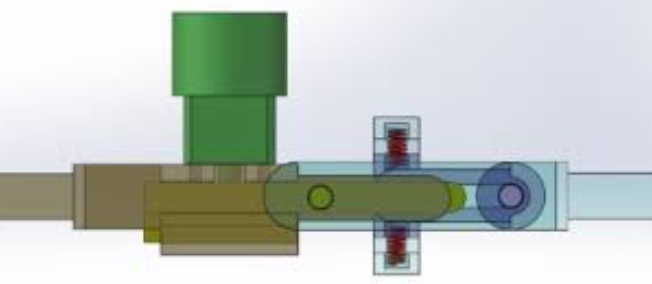
Force feedback glove is a promising interface for producing immersive haptic sensation in virtual reality and teleoperation systems. One open problem of existing gloves is to simulate virtual objects with adjustable stiffness in a fast dynamic response, along with lightweight and good back-drivability. In this paper, we introduce a leverage pivot modulating mechanism to achieve variable stiffness simulation for force feedback gloves. To simulate free space operation, the revolute pairs of the mechanism move in the unlocked state, which allows the user to clench his/her first or fully extend fingers. To simulate constrained space operation, the revolute pairs are locked and passive feedback forces are generated at the fingertip. The total weight of the single-finger prototype glove is 55g. Experimental results show that the backdrive force of the glove is less than 0.069N in the free space, and the fingertip force reaches up to 12.76N in the constrained space. The stiffness of the glove is tuned by changing its structural stiffness, which ranges from 136.96Nmm/rad to 3368.99Nmm/rad.