DodecaPen: Accurate 6DoF Tracking of a Passive Stylus

Title: DodecaPen: Accurate 6DoF Tracking of a Passive Stylus
Teams: Facebook
Writers: Po-Chen Wu, Robert Wang, Kenrick Kin, Christopher Twigg, Shangchen Han, Ming-Hsuan Yang, Shao-Yi Chien
Publication date: October 25, 2017
Abstract
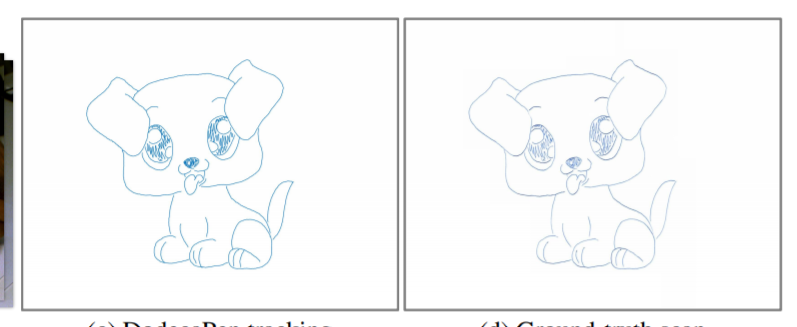
We propose a system for real-time six degrees of freedom(6DoF) tracking of a passive stylus that achieves sub-millimeter accuracy, which is suitable for writing or drawing in mixed reality applications. Our system is particularly easy to implement, requiring only a monocular camera, a 3D printed dodecahedron, and hand-glued binary square markers. The accuracy and performance we achieve are due to model-based tracking using a calibrated model and a combination of sparse pose estimation and dense alignment. We demonstrate the system performance in terms of speed and accuracy on a number of synthetic and real datasets, showing that it can be competitive with state-of-the-art multi-camera motion capture systems. We also demonstrate several applications of the technology ranging from 2D and 3D drawing in VR to general object manipulation and board games.