xR-EgoPose: Egocentric 3D Human Pose from an HMD Camera

PubDate: Jul 2019
Teams: University College London;Facebook Reality Lab
Writers: Denis Tome, Patrick Peluse, Lourdes Agapito, Hernan Badino
PDF: xR-EgoPose: Egocentric 3D Human Pose from an HMD Camera
Abstract
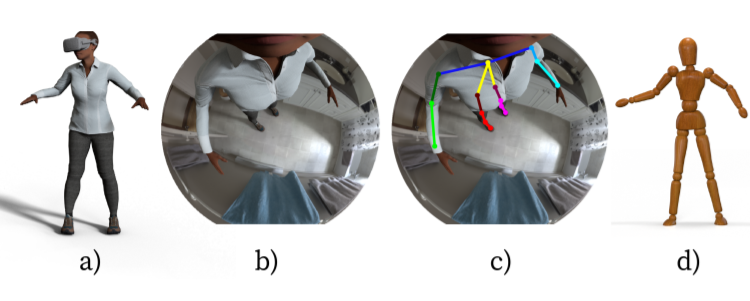
We present a new solution to egocentric 3D body pose estimation from monocular images captured from a downward looking fish-eye camera installed on the rim of a head mounted virtual reality device. This unusual viewpoint, just 2 cm. away from the user’s face, leads to images with unique visual appearance, characterized by severe self-occlusions and strong perspective distortions that result in a drastic difference in resolution between lower and upper body. Our contribution is two-fold. Firstly, we propose a new encoder-decoder architecture with a novel dual branch decoder designed specifically to account for the varying uncertainty in the 2D joint locations. Our quantitative evaluation, both on synthetic and real-world datasets, shows that our strategy leads to substantial improvements in accuracy over state of the art egocentric pose estimation approaches. Our second contribution is a new large-scale photorealistic synthetic dataset - xR-EgoPose - offering 383K frames of high quality renderings of people with a diversity of skin tones, body shapes, clothing, in a variety of backgrounds and lighting conditions, performing a range of actions. Our experiments show that the high variability in our new synthetic training corpus leads to good generalization to real world footage and to state of the art results on real world datasets with ground truth. Moreover, an evaluation on the Human3.6M benchmark shows that the performance of our method is on par with top performing approaches on the more classic problem of 3D human pose from a third person viewpoint.
