Privacy Preserving Localization and Mapping from Uncalibrated Cameras

PubDate: June 2021
Teams: 1Department of Computer Science, ETH Zurich 2 Microsoft
Writers: Marcel Geppert1 Viktor Larsson1 Pablo Speciale2Johannes L. Schonberger ¨2 Marc Pollefeys1,2
PDF: Privacy Preserving Localization and Mapping from Uncalibrated Cameras
Abstract
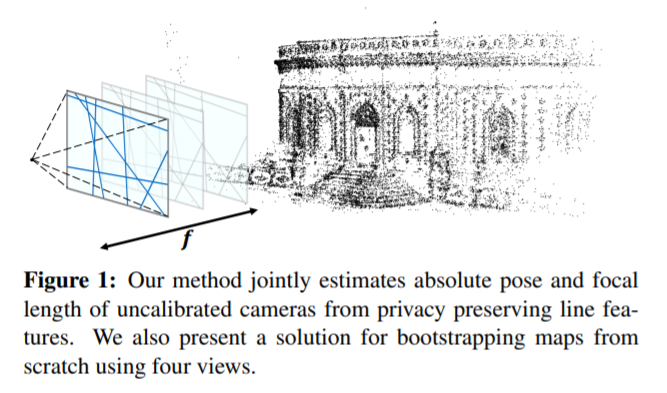
Recent works on localization and mapping from privacy preserving line features have made significant progress towards addressing the privacy concerns arising from cloudbased solutions in mixed reality and robotics. The requirement for calibrated cameras is a fundamental limitation for
these approaches, which prevents their application in many crowd-sourced mapping scenarios. In this paper, we propose a solution to the uncalibrated privacy preserving localization and mapping problem. Our approach simultaneously recovers the intrinsic and extrinsic calibration of a camera from line-features only. This enables uncalibrated devices to both localize themselves within an existing map as well as contribute to the map, while preserving the privacy of the image contents. Furthermore, we also derive a solution to bootstrapping maps from scratch using only uncalibrated devices. Our approach provides comparable performance to the calibrated scenario and the privacy compromising alternatives based on traditional point features.