Licker: A Tongue Robot for Representing Realistic Tongue Motions

PubDate: November 2019
Teams: The University of Electro-Communications
Writers: Ryota Shijo;Mizuki Nagano;Izumi Mizoguchi;Takahiro Ando;Kanji Tamura;Keigo Hiki;Sho Sakurai;Koichi Hirota;Takuya Nojima
PDF: Licker: A Tongue Robot for Representing Realistic Tongue Motions
Abstract
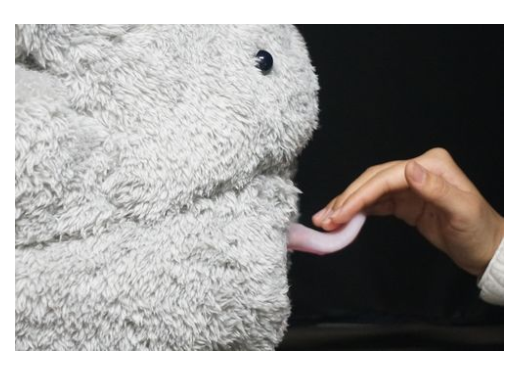
We present Licker, a flexible tongue robot that is capable of mimicking a human tongue motion. The aim of this robot is to grow social bonding, regardless of species by licking. At first, we analyzed the human tongue motion and found four basic motions. Based on this result, we developed an originally designed tongue motion robot. Then, we also carefully designed tactile feeling of the tongue, such as softness of tongue itself and slimy feeling of saliva. By using this robot, we could confirm through demonstrations that this robot can present realistic tactile feeling being licked.

