Making bioinspired 3D-printed autonomic perspiring hydrogel actuators

PubDate: February 24, 2021
Teams: Facebook Reality Labs
Writers: Anand Kumar Mishra, Wenyang Pan, Emmanuel P. Giannelis, Robert F. Shepherd, Thomas J. Wallin
PDF: Making bioinspired 3D-printed autonomic perspiring hydrogel actuators
Abstract
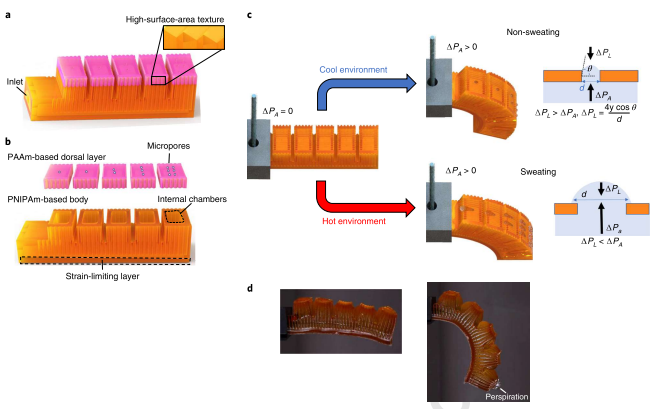
To mitigate the adverse effects of elevated temperatures, conventional rigid devices use bulky radiators, heat sinks and fans to dissipate heat from sensitive components. Unfortunately, these thermoregulation strategies are incompatible with soft robots, a growing field of technology that, like biology, builds compliant and highly deformable bodies from soft materials to enable functional adaptability. Here, we design fluidic elastomer actuators that autonomically perspire at elevated temperatures. This strategy incurs operational penalties (i.e., decreased actuation efficiency and loss of hydraulic fluid) but provides for thermoregulation in soft systems. In this bioinspired approach, we 3D-print finger-like actuators from smart gels with embedded micropores that autonomically dilate and contract in response to temperature. During high-temperature operation, the internal hydraulic fluid flows through the dilated pores, absorbs heat and vaporizes. Upon cooling, the pores contract to restrict fluid loss and restore operation. To assess the thermoregulatory performance, this protocol uses non-invasive thermography to measure the local temperatures of the robot under varied conditions. A mathematical model based on Newton’s law of cooling quantifies the cooling performance and enables comparison between competing designs. Fabrication of the sweating actuator usually takes 3–6 h, depending on size, and can provide >100 W/kg of additional cooling capacity.