A 6-DOF haptic manipulation system to verify assembly procedures on CAD models

PubDate: Sep 2019
Teams: TeCIP Institute
Writers: Paolo Tripicchio, Carlo Alberto Avizzano, Massimo Bergamasco
PDF: A 6-DOF haptic manipulation system to verify assembly procedures on CAD models
Abstract
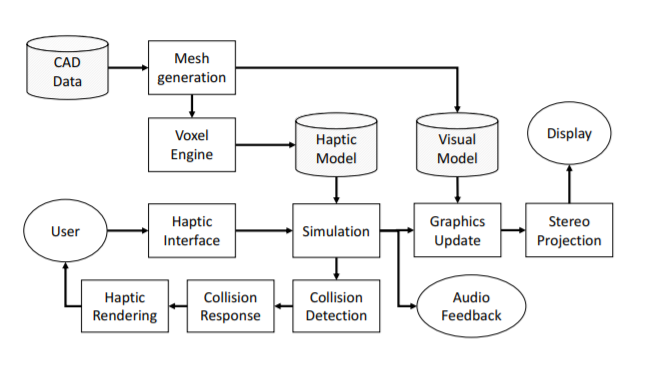
During the design phase of products and before going into production, it is necessary to verify the presence of mechanical plays, tolerances, and encumbrances on production mockups. This work introduces a multi-modal system that allows verifying assembly procedures of products in Virtual Reality starting directly from CAD models. Thus leveraging the costs and speeding up the assessment phase in product design. For this purpose, the design of a novel 6-DOF Haptic device is presented. The achieved performance of the system has been validated in a demonstration scenario employing state-of-the-art volumetric rendering of interaction forces together with a stereoscopic visualization setup.