Development of a Wearable Underactuated Finger Exoskeleton for Haptics: Preliminary Formal Results

PubDate: November 2021
Teams: Center for Research and Advanced Studies of the IPN;National Council of Science and Technology
Writers: Gilberto Alexis Reyes-Perez; Nadia Garcia-Hernandez; Vicente Parra-Vega
PDF: Development of a Wearable Underactuated Finger Exoskeleton for Haptics: Preliminary Formal Results

Abstract
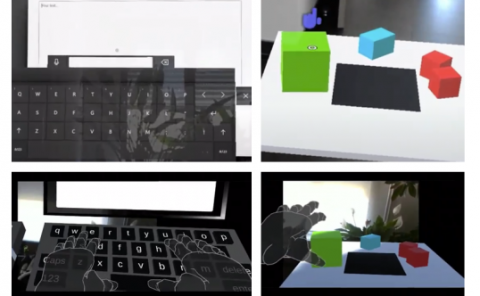
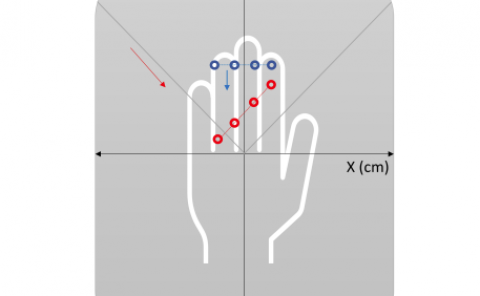
The development of an active 1-finger exoskeleton stands for a challenging issue due to high-end specs and functional requirements, far from a finger robot, including wearability to start with. The latter relates not only to a lightweight mechanical structure with dynamic response, thus bandwidth and low latency, that facilitate transparency, but un-constrained natural Range of Motion (ROM), and usability. In addition to design, manufacturing and sensory-motor integration, psychophysics and haptic guidelines add complexity, over-all intertwined requiring interdisciplinary knowledge. Inspired by the hyper-underactuated robotic architecture of the wearable Hexotrac multi-finger hand robot [1], we develop an open architecture 1-finger exoskeleton ready to be enlarged as multi-fingered. Human-in-the-loop experiments show unconstrained 6D natural ROM of active index-finger, with functionality as haptic finger-robot running in virtual environments developed in Unity3D. Analysis shows that indeed human interaction force is propagated as torques into input channels to command the exoskeleton as a cyberphysical system, in free and constrained motion. This highlights addressing the exoskeleton jointly with biomechanical and psychophysical human specs, an issue little explored in the literature.