Design and Analysis of a High-Performance Impedance-Based Hybrid Haptic Interface

Title: Design and Analysis of a High-Performance Impedance-Based Hybrid Haptic Interface
Teams: Facebook
Writers: Patrick Dills, Chembian Parthiban, It Fufuengsin, Nick Colonnese, Michael Zinn
Publication date: March 25, 2018
Abstract
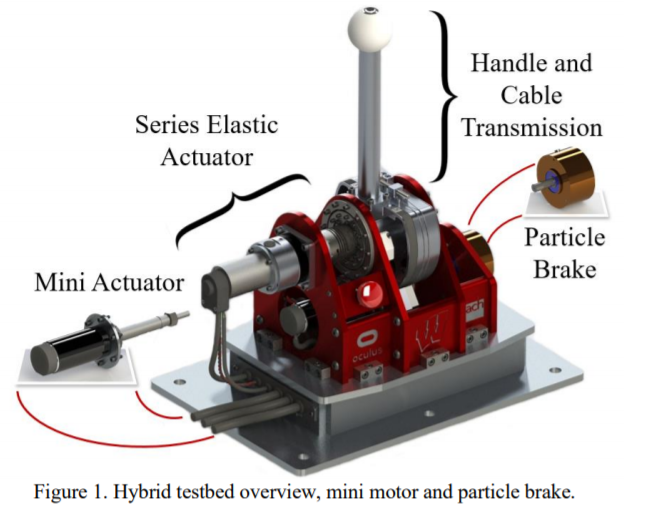
This paper describes the design of a novel, high-performance one degree-of-freedom hybrid haptic interface. The interface integrates a particle brake, a Series Elastic Actuator (SEA), and a small DC motor into a single actuator. Unlike existing hybrid designs, the one presented here does not suffer from a significant mismatch between passive and active torque capability. The paper describes the design of the three actuator components. The motivation for selecting a particle brake is discussed. The SEA design approach is contextualized through its integration into the hybrid actuator, and the ideal SEA spring stiffness for the actuator is explored. Finally, mini motor design and sizing considering SEA and particle brake performance is included. The interface design provides insight into the dynamics of the system as a whole and allows for additional future work in control and optimization.