Human-centric telerobotics: investigating users’ performance and workload via VR-based eye-tracking measures

PubDate: Dec 2022
Teams: Federica Nenna, Davide Zanardi, Luciano Gamberini
Writers: Federica Nenna, Davide Zanardi, Luciano Gamberini
Abstract
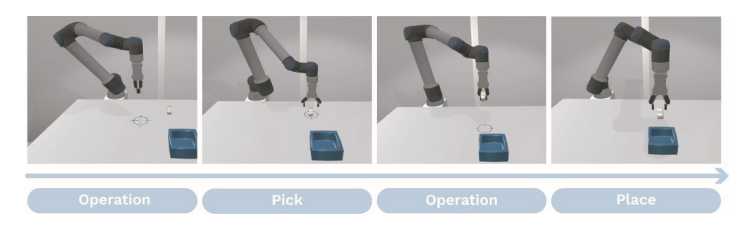
Virtual Reality (VR) is gaining ground in the robotics and teleoperation industry, opening new prospects as a novel computerized methodology to make humans interact with robots. In contrast with more conventional button-based teleoperations, VR allows users to use their physical movements to drive robotic systems in the virtual environment. The latest VR devices are also equipped with integrated eye-tracking, which constitutes an exceptional opportunity for monitoring users’ workload online. However, such devices are fairly recent, and human factors have been consistently marginalized so far in telerobotics research. We thus covered these aspects by analyzing extensive behavioral data generated by 24 participants driving a simulated industrial robot in VR through a pick-and-place task. Users drove the robot via button-based and action-based controls and under low (single-task) and high (dual-task) mental demands. We collected self-reports, performance and eye-tracking data. Specifically, we asked i) how the interactive features of VR affect users’ performance and workload, and additionally tested ii) the sensibility of diverse eye parameters in monitoring users’ vigilance and workload throughout the task. Users performed faster and more accurately, while also showing a lower mental workload, when using an action-based VR control. Among the eye parameters, pupil size was the most resilient indicator of workload, as it was highly correlated with the self-reports and was not affected by the user’s degree of physical motion in VR. Our results thus bring a fresh human-centric overview of human-robot interactions in VR, and systematically demonstrate the potential of VR devices for monitoring human factors in telerobotics contexts.

