iSDF: Real-Time Neural Signed Distance Fields for Robot Perception

PubDate: Jun 2022
Teams: Imperial College London;Meta
Writers: Joseph Ortiz, Alexander Clegg, Jing Dong, Edgar Sucar, David Novotny, Michael Zollhoefer, Mustafa Mukadam
PDF: iSDF: Real-Time Neural Signed Distance Fields for Robot Perception
Abstract
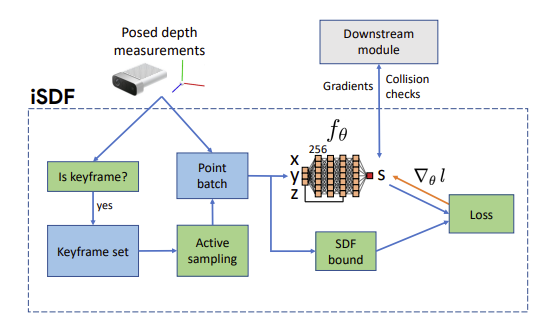
We present iSDF, a continual learning system for real-time signed distance field (SDF) reconstruction. Given a stream of posed depth images from a moving camera, it trains a randomly initialized neural network to map input 3D coordinate to approximate signed distance. The model is self-supervised by minimizing a loss that bounds the predicted signed distance using the distance to the closest sampled point in a batch of query points that are actively sampled. In contrast to prior work based on voxel grids, our neural method is able to provide adaptive levels of detail with plausible filling in of partially observed regions and denoising of observations, all while having a more compact representation. In evaluations against alternative methods on real and synthetic datasets of indoor environments, we find that iSDF produces more accurate reconstructions, and better approximations of collision costs and gradients useful for downstream planners in domains from navigation to manipulation. Code and video results can be found at our project page: https://joeaortiz.github.io/iSDF/.
