Event-Triggered Optimal Formation Tracking Control Using Reinforcement Learning for Large-Scale UAV Systems

PubDate: Jan 2023
Teams: Beihang University
Writers: Ziwei Yan, Liang Han, Xiaoduo Li, Jinjie Li
Abstract
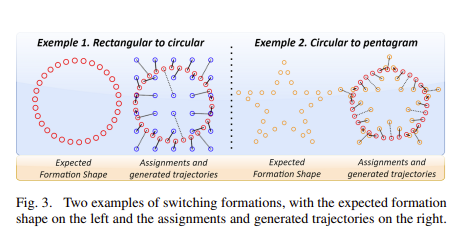
Large-scale UAV switching formation tracking control has been widely applied in many fields such as search and rescue, cooperative transportation, and UAV light shows. In order to optimize the control performance and reduce the computational burden of the system, this study proposes an event-triggered optimal formation tracking controller for discrete-time large-scale UAV systems (UASs). And an optimal decision - optimal control framework is completed by introducing the Hungarian algorithm and actor-critic neural networks (NNs) implementation. Finally, a large-scale mixed reality experimental platform is built to verify the effectiveness of the proposed algorithm, which includes large-scale virtual UAV nodes and limited physical UAV nodes. This compensates for the limitations of the experimental field and equipment in realworld scenario, ensures the experimental safety, significantly reduces the experimental cost, and is suitable for realizing largescale UAV formation light shows.