Demonstration of TORC: A Virtual Reality Controller for In-Hand High-Dexterity Finger Interaction

PubDate: October 2019
Teams: Korea Advanced Institute of Science and Technology,Microsoft Researc
Writers: Jaeyeon Lee;Mike Sinclair;Mar Gonzalez-Franco;Eyal Ofek;Christian Holz
PDF: Demonstration of TORC: A Virtual Reality Controller for In-Hand High-Dexterity Finger Interaction

Abstract
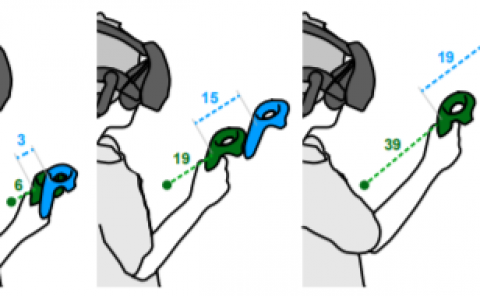
Recent hand-held controllers have explored a variety of haptic feedback sensations for users in virtual reality by producing both kinesthetic and cutaneous feedback from virtual objects. These controllers are grounded to the user’s hand and can only manipulate objects through arm and wrist motions, not using the dexterity of their fingers as they would in real life. In this paper, we present TORC, a rigid haptic controller that renders virtual object characteristics and behaviors such as texture and compliance. Users hold and squeeze TORC using their thumb and two fingers and interact with virtual objects by sliding their thumb on TORC’s trackpad. During the interaction, vibrotactile motors produce sensations to each finger that represent the haptic feel of squeezing, shearing or turning an object. We demonstrate the TORC interaction scenarios for a virtual object in hand.