Decoupled Localization and Sensing with HMD-based AR for Interactive Scene Acquisition

PubDate: June 2020
Teams: Serge Belongie,Cornell Tech
Writers: Søren Skovsen, Harald Haraldsson, Abe Davis, Henrik Karstoft, Serge Belongie
PDF: Decoupled Localization and Sensing with HMD-based AR for Interactive Scene Acquisition
Abstract
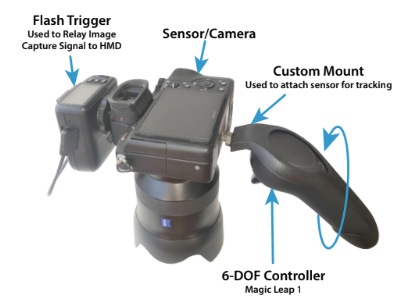
Real-time tracking and visual feedback offer interactive AR-assisted capture systems as a convenient and low-cost alternative to specialized sensor rigs and robotic gantries. We present a simple strategy for decoupling localization and visual feedback in these applications from the primary sensor being used to capture the scene. Our strategy is to use an AR HMD and 6-DOF controller for tracking and feedback, synchronized with a separate primary sensor for capturing the scene. In this extended abstract, we present a prototype implementation of this strategy and investigate the accuracy of decoupled tracking by comparing runtime pose estimates to the results of high-resolution offline SfM.