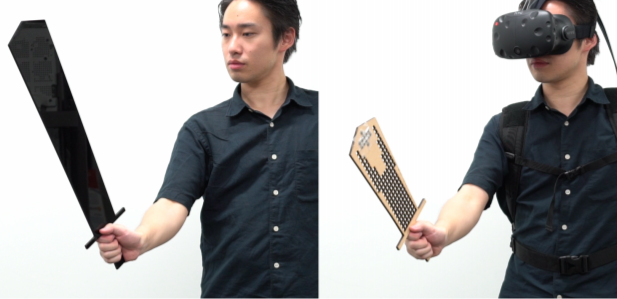
Computational design of hand-held VR controllers using haptic shape illusion

PubDate: November 2017
Teams: The University of Tokyo;National Institute of Advanced Industrial Science and Technolog
Writers: Eisuke Fujinawa;Shigeo Yoshida;Yuki Koyama;Takuji Narumi;Tomohiro Tanikawa;Michitaka Hirose
PDF: Computational design of hand-held VR controllers using haptic shape illusion
Abstract
Humans are capable of haptically perceiving the shape of an object by simply wielding it, even without seeing it. On the other hand, typical hand-held controllers for virtual reality (VR) applications are pre-designed for general applications, and thus not capable of providing appropriate haptic shape perception when wielding specific virtual objects. Contradiction between haptic and visual shape perception causes a lack of immersion and leads to inappropriate object handling in VR. To solve this problem, we propose a novel method for designing hand-held VR controllers which illusorily represent haptic equivalent of visual shape in VR. In ecological psychology, it has been suggested that the perceived shape can be modeled using the limited mass properties of wielded objects. Based on this suggestion, we built a shape perception model using a data-driven approach; we aggregated data of perceived shapes against various hand-held VR controllers with different mass properties, and derived the model using regression techniques. We implemented a design system which enables automatic design of hand-held VR controllers whose actual shapes are smaller than target shapes while maintaining their haptic shape perception. We verified that controllers designed with our system can present aimed shape perception irrespective of their actual shapes.