Online Temporal Calibration for Monocular Visual-Inertial Systems

PubDate: Aug 2018
Teams: Hong Kong University of Science and
Technology
Writers: Tong Qin, Shaojie Shen
PDF: Online Temporal Calibration for Monocular Visual-Inertial Systems
Abstract
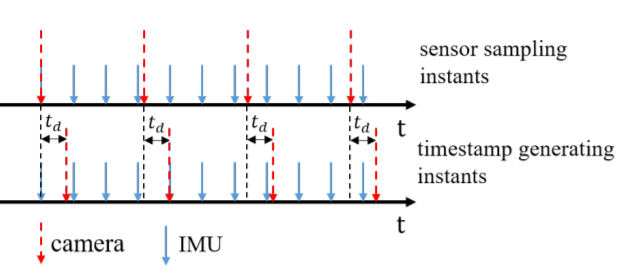
Accurate state estimation is a fundamental module for various intelligent applications, such as robot navigation, autonomous driving, virtual and augmented reality. Visual and inertial fusion is a popular technology for 6-DOF state estimation in recent years. Time instants at which different sensors’ measurements are recorded are of crucial importance to the system’s robustness and accuracy. In practice, timestamps of each sensor typically suffer from triggering and transmission delays, leading to temporal misalignment (time offsets) among different sensors. Such temporal offset dramatically influences the performance of sensor fusion. To this end, we propose an online approach for calibrating temporal offset between visual and inertial measurements. Our approach achieves temporal offset calibration by jointly optimizing time offset, camera and IMU states, as well as feature locations in a SLAM system. Furthermore, the approach is a general model, which can be easily employed in several feature-based optimization frameworks. Simulation and experimental results demonstrate the high accuracy of our calibration approach even compared with other state-of-art offline tools. The VIO comparison against other methods proves that the online temporal calibration significantly benefits visual-inertial systems. The source code of temporal calibration is integrated into our public project, VINS-Mono.