Omnipotent Virtual Giant for Remote Human-Swarm Interaction

PubDate: Apr 2019
Teams: The University of Manchester
Writers: Inmo Jang, Junyan Hu, Farshad Arvin, Joaquin Carrasco, Barry Lennox
PDF: Omnipotent Virtual Giant for Remote Human-Swarm Interaction

Abstract
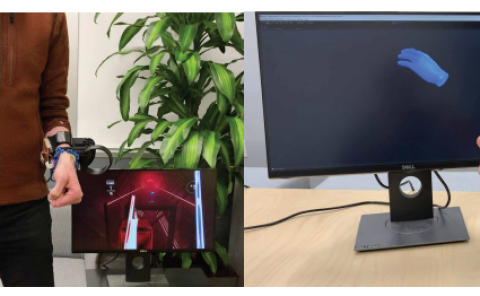
This paper proposes an intuitive human-swarm interaction framework inspired by our childhood memory in which we interacted with living ants by changing their positions and environments as if we were omnipotent relative to the ants. In virtual reality, analogously, we can be a super-powered virtual giant who can supervise a swarm of mobile robots in a vast and remote environment by flying over or resizing the world and coordinate them by picking and placing a robot or creating virtual walls. This work implements this idea by using Virtual Reality along with Leap Motion, which is then validated by proof-of-concept experiments using real and virtual mobile robots in mixed reality. We conduct a usability analysis to quantify the effectiveness of the overall system as well as the individual interfaces proposed in this work. The results revealed that the proposed method is intuitive and feasible for interaction with swarm robots, but may require appropriate training for the new end-user interface device.