DronePick: Object Picking and Delivery Teleoperation with the Drone Controlled by a Wearable Tactile Display

PubDate: Aug 2019
Teams: Skolkovo Institute of Science and Technology
Writers: Roman Ibrahimov, Evgeny Tsykunov, Vladimir Shirokun, Andrey Somov, Dzmitry Tsetserukou
Abstract
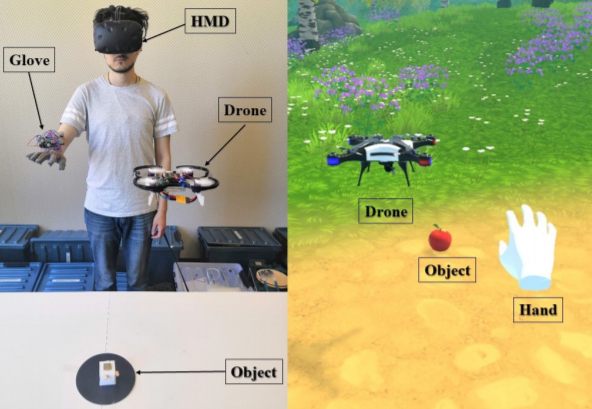
We report on the teleoperation system DronePick which provides remote object picking and delivery by a human-controlled quadcopter. The main novelty of the proposed system is that the human user continuously gets the visual and haptic feedback for accurate teleoperation. DronePick consists of a quadcopter equipped with a magnetic grabber, a tactile glove with finger motion tracking sensor, hand tracking system, and the Virtual Reality (VR) application. The human operator teleoperates the quadcopter by changing the position of the hand. The proposed vibrotactile patterns representing the location of the remote object relative to the quadcopter are delivered to the glove. It helps the operator to determine when the quadcopter is right above the object. When the “pick” command is sent by clasping the hand in the glove, the quadcopter decreases its altitude and the magnetic grabber attaches the target object. The whole scenario is in parallel simulated in VR. The air flow from the quadcopter and the relative positions of VR objects help the operator to determine the exact position of the delivered object to be picked. The experiments showed that the vibrotactile patterns were recognized by the users at the high recognition rates: the average 99% recognition rate and the average 2.36s recognition time. The real-life implementation of DronePick featuring object picking and delivering to the human was developed and tested.
