Tactile Perception of Objects by the User’s Palm for the Development of Multi-contact Wearable Tactile Displays

PubDate: Jun 2020
Teams: Skolkovo Institute of Science and Technology
Writers: Miguel Altamirano Cabrera, Juan Heredia, Dzmitry Tsetserukou
Abstract
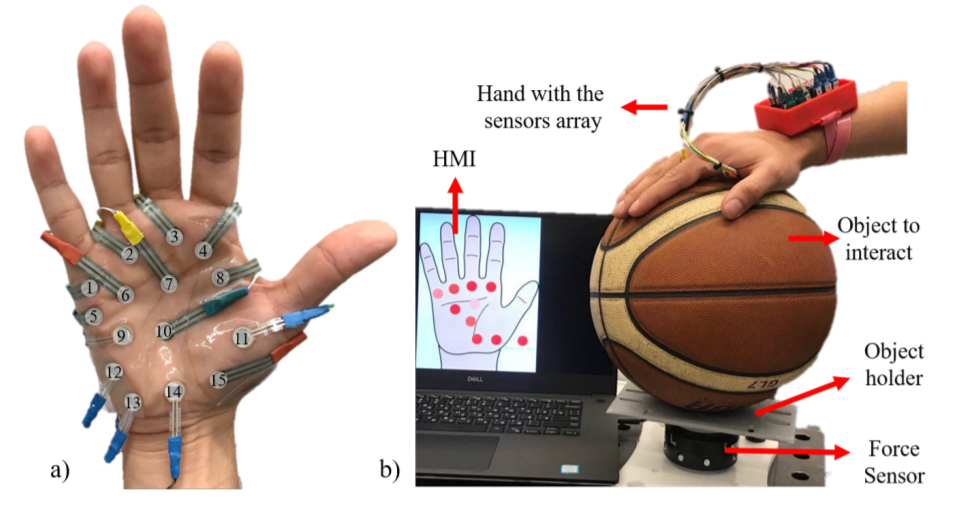
The user’s palm plays an important role in object detection and manipulation. The design of a robust multi-contact tactile display must consider the sensation and perception of of the stimulated area aiming to deliver the right stimuli at the correct location. To the best of our knowledge, there is no study to obtain the human palm data for this purpose. The objective of this work is to introduce the method to investigate the user’s palm sensations during the interaction with objects. An array of fifteen Force Sensitive Resistors (FSRs) was located at the user’s palm to get the area of interaction, and the normal force delivered to four different convex surfaces. Experimental results showed the active areas at the palm during the interaction with each of the surfaces at different forces. The obtained results can be applied in the development of multi-contact wearable tactile and haptic displays for the palm, and in training a machine-learning algorithm to predict stimuli aiming to achieve a highly immersive experience in Virtual Reality.