Are Large-Scale 3D Models Really Necessary for Accurate Visual Localization?

Title: Are Large-Scale 3D Models Really Necessary for Accurate Visual Localization?
Teams: Microsoft
Writers: Torsten Sattler Akihiko Torii Josef Sivic Marc Pollefeys Hajime Taira Masatoshi Okutomi Tomas Pajdla
Publication date: July 2017
Abstract
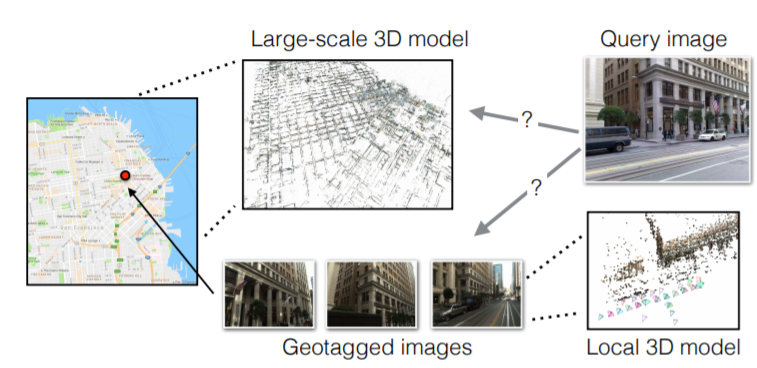
Accurate visual localization is a key technology for autonomous navigation. 3D structure-based methods employ 3D models of the scene to estimate the full 6DOF pose of a camera very accurately. However, constructing (and extending) large-scale 3D models is still a significant challenge. In contrast, 2D image retrieval-based methods only require a database of geo-tagged images, which is trivial to construct and to maintain. They are often considered inaccurate since they only approximate the positions of the cameras. Yet, the exact camera pose can theoretically be recovered when enough relevant database images are retrieved. In this paper, we demonstrate experimentally that large-scale 3D models are not strictly necessary for accurate visual localization. We create reference poses for a large and challenging urban dataset. Using these poses, we show that combining image-based methods with local reconstructions results in a pose accuracy similar to the state-of-the-art structure-based methods. Our results suggest that we might want to reconsider the current approach for accurate large-scale localization.