Design and manufacturing of a virtual reality-assisted teleoperated excavator platform

PubDate: Aug 2020
Teams: University of Nevada
Writers: Salimov, Meirzhan
PDF: Design and manufacturing of a virtual reality-assisted teleoperated excavator platform
Abstract
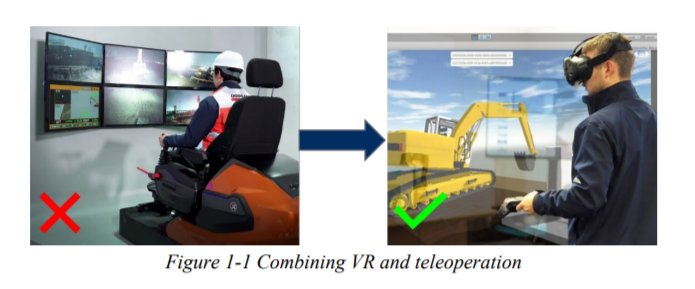
This research work studies the development of a teleoperation system for excavator robot using virtual reality (VR) technologies. The purpose of this study is to implement VR for a teleoperated excavator that the operator uses a VR headset instead of conventional video stream displays. This system provides a better perspective to give the impressions in a lifelike virtual environment for operators who can observe and inspect the real working environment. In order to develop a simulation environment for testing and adjusting the parameters, a small robot with electric actuators and gear motors was built and will be equipped with positioning sensors and cameras. This work proposes a design and manufacturing of mobile excavator robot as well as an architecture of hardware and software for remote control systems. Also, the designed apparatus can be utilized as an equipment training simulator to help new users learn to safely function and control real-life machines. Finally, future research opportunities related to VR assisted teleoperation of excavators are highlighted.