Encountered-Type Haptic Interface for Representation of Shape and Rigidity of 3D Virtual ObjectsEncountered-Type Haptic Interface for Representation of Shape and Rigidity of 3D Virtual Objects

PubDate: Aug 2017
Teams: Engineering, University of Tsukuba,University of Tsukuba;
Writers: Naoki Takizawa ; Hiroaki Yano ; Hiroo Iwata ; Yukio Oshiro ; Nobuhiro Ohkohchi
PDF: Encountered-Type Haptic Interface for Representation of Shape and Rigidity of 3D Virtual Objects
Abstract
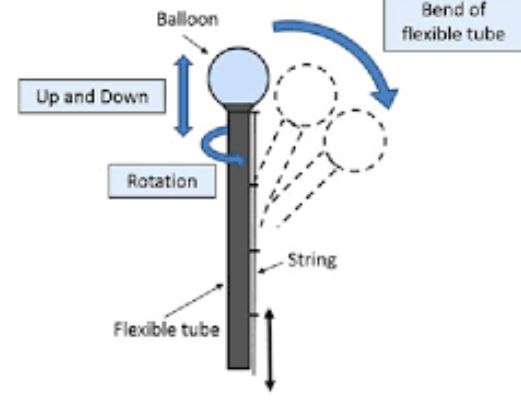
This paper describes the development of an encountered-type haptic interface that can generate the physical characteristics, such as shape and rigidity, of three-dimensional (3D) virtual objects using an array of newly developed non-expandable balloons. To alter the rigidity of each non-expandable balloon, the volume of air in it is controlled through a linear actuator and a pressure sensor based on Hooke’s law. Furthermore, to change the volume of each balloon, its exposed surface area is controlled by using another linear actuator with a trumpet-shaped tube. A position control mechanism is constructed to display virtual objects using the balloons. The 3D position of each balloon is controlled using a flexible tube and a string. The performance of the system is tested and the results confirm the effectiveness of the proposed principle and interface.