Direct hand manipulation of constrained virtual objects

PubDate: December 2017
Teams: Korea Institute of Science and Technology
Writers: Jun-Sik Kim ; Jung-Min Park
PDF: Direct hand manipulation of constrained virtual objects
Abstract
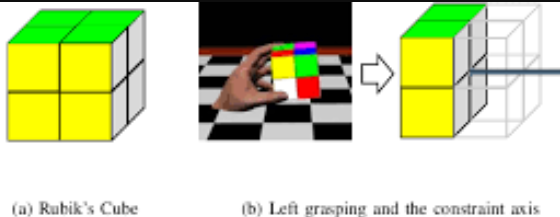
We propose a direct object manipulation system that a user can manipulate objects constrained to each other by his or her hands. Because there is no haptic feedback to a user, manipulation of constrained objects is much harder than that of a simple rigid body. In addition, many physics simulator usually suffers from instability in handling the constrained objects in a virtual system. We solve the problem by adding another micro simulator which enforce the constraint between the objects, and guarantees that the rendered image of an object and its physics counterpart always satisfy the given constraint. The experiment shows that the proposed method makes a user manipulate constrained objects with no difficulties in the way that he or she manipulates such objects in the real world.