Hand movement parameters calculated by the LEAP based Virtual Glove

PubDate: June 2018
Teams: Università degli Studi dell’Aquila
Writers: Matteo Polsinelli;Paola Andrea Banchetti;Angelo Cacchio;Vittorio Calvisi
PDF: Hand movement parameters calculated by the LEAP based Virtual Glove
Abstract
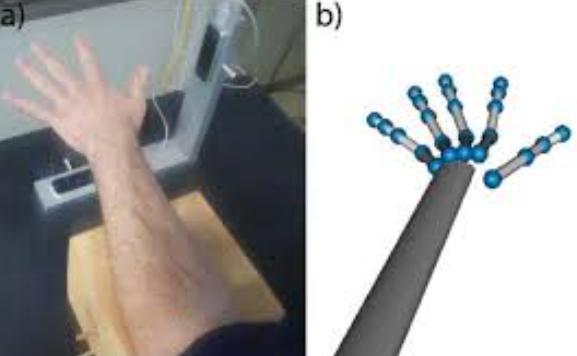
Hand rehabilitation therapy is fundamental in the recovery process for patients suffering from post-stroke or postsurgery impairments. Beside traditional approaches, that require the presence of therapist during the sessions (with high costs and subjective measurements), alternative approaches can be employed. A novel multi-sensor approach, the Virtual Glove (VG), is based on the simultaneous use of two LEAP motion controllers to track the hand motion and to reconstruct a numerical hand model in real time. In this paper, we illustrate how the VG can be used to calculate and represent graphically static and dynamic hand numerical parameters used to assess the Ranges Of Motion (ROM) of the hand articulations, which are the basis for objective evaluation of a rehabilitation task.