I Like to Move It: 6D Pose Estimation as an Action Decision Process

PubDate: Sep 2020
Teams: Technical University of Munich
Writers: Benjamin Busam, Hyun Jun Jung, Nassir Navab
PDF: I Like to Move It: 6D Pose Estimation as an Action Decision Process
Abstract
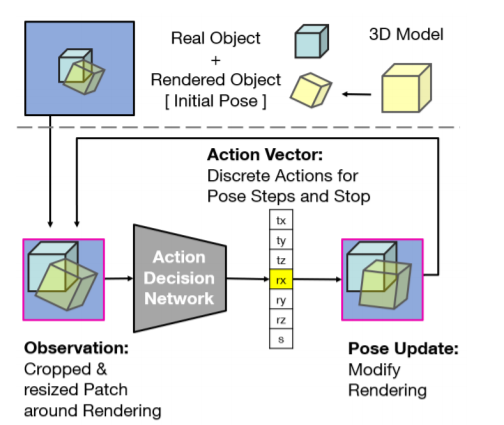
Object pose estimation is an integral part of robot vision and augmented reality. Robust and accurate pose prediction of both object rotation and translation is a crucial element to enable precise and safe human-machine interactions and to allow visualization in mixed reality. Previous 6D pose estimation methods treat the problem either as a regression task or discretize the pose space to classify. We reformulate the problem as an action decision process where an initial pose is updated in incremental discrete steps that sequentially move a virtual 3D rendering towards the correct solution. A neural network estimates likely moves from a single RGB image iteratively and determines so an acceptable final pose. In comparison to previous approaches that learn an object-specific pose embedding, a decision process allows for a lightweight architecture while it naturally generalizes to unseen objects. Moreover, the coherent action for process termination enables dynamic reduction of the computation cost if there are insignificant changes in a video sequence. While other methods only provide a static inference time, we can thereby automatically increase the runtime depending on the object motion. We evaluate robustness and accuracy of our action decision network on video scenes with known and unknown objects and show how this can improve the state-of-the-art on YCB videos significantly.