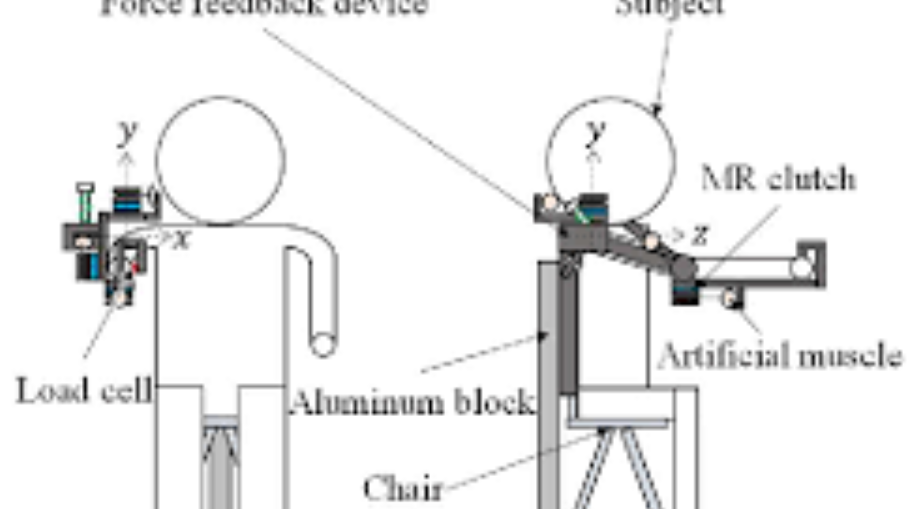
Rendering friction and viscosity using a wearable 4 degrees of freedom force feedback device with magnetorheological fluid clutches and pneumatic artificial muscles

PubDate: December 2019
Teams: Chuo University
Writers: Yuki Onozuka; Minoru Oba; Manabu Okui; Taro Nakamura
Abstract
Using a head-mounted display, users can immerse themselves in virtual reality space and users can via the visual recognition of virtual objects. However, users do not experience the same haptic perception when they interact with these objects, that they do with actual objects. Force feedback devices can render haptic perception. They are classified into desktop and wearable types. A wearable 1 degree of freedom force feedback device using magnetorheological fluid brake, magnetorheological clutches, and pneumatic artificial muscles has been previously developed and it was confirmed that the device can render elasticity, friction, and viscosity. In addition, a wearable 4 degrees of freedom force feedback device using magnetorheological fluid clutches and pneumatic artificial muscles that can render elasticity was also previously developed. However, it was not established that the device could render friction, and viscosity using magnetorheological fluid clutches and pneumatic artificial muscles. In this report, it is confirmed that such a device can render friction and viscosity using magnetorheological fluid clutches and pneumatic artificial muscles without the need for magnetorheological fluid brake.