Constraining Dense Hand Surface Tracking with Elasticity

PubDate: December 2020
Teams: Facebook
Writers: Breannan Smith, Chenglei Wu, He Wen, Patrick Peluse, Yaser Sheikh, Jessica Hodgins, Takaaki Shiratori
PDF: Constraining Dense Hand Surface Tracking with Elasticity
Abstract
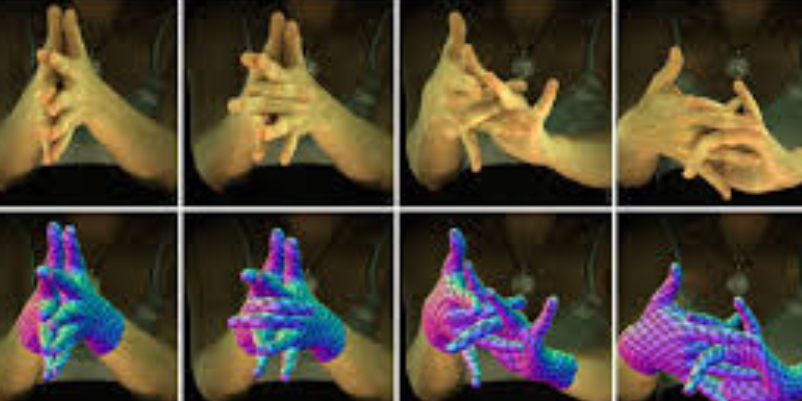
Many of the actions that we take with our hands involve self-contact and occlusion: shaking hands, making a fist, or interlacing our fingers while thinking. This use of of our hands illustrates the importance of tracking hands through self-contact and occlusion for many applications in computer vision and graphics, but existing methods for tracking hands and faces are not designed to treat the extreme amounts of self-contact and self-occlusion exhibited by common hand gestures. By extending recent advances in vision-based tracking and physically based animation, we present the first algorithm capable of tracking high-fidelity hand deformations through highly self-contacting and self-occluding hand gestures, for both single hands and two hands. By constraining a vision-based tracking algorithm with a physically based deformable model, we obtain an algorithm that is robust to the ubiquitous self-interactions and massive self-occlusions exhibited by common hand gestures, allowing us to track two hand interactions and some of the most difficult possible configurations of a human hand.