Sweeping-based volumetric calibration and registration of multiple RGBD-sensors for 3D capturing systems

PubDate: April 2017
Teams: Bauhaus-Universität Weimar
Writers: Stephan Beck; Bernd Froehlich
Abstract
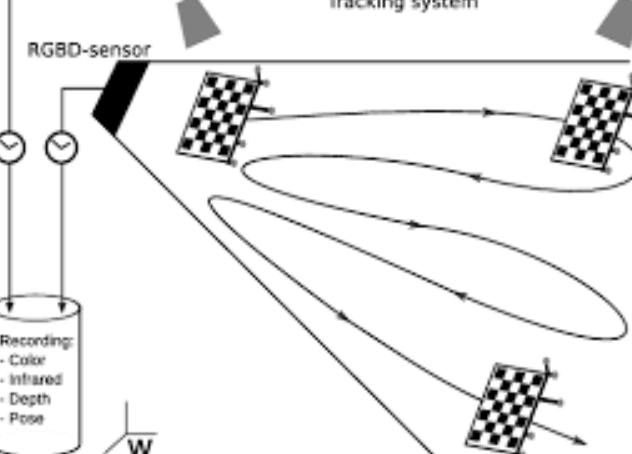
The accurate calibration and registration of a set of color and depth (RGBD) sensors into a shared coordinate system is an essential requirement for 3D surround capturing systems. We present a method to calibrate multiple unsynchronized RGBD-sensors with high accuracy in a matter of minutes by sweeping a tracked checkerboard through the desired capturing space in front of each sensor. Through the sweeping process, a large number of robust correspondences between the depth and the color image as well as the 3D world positions can be automatically established. In order to obtain temporally synchronized correspondences between an RGBD-sensor’s data streams and the tracked target’s positions we apply an off-line optimization process based on error minimization and a coplanarity constraint. The correspondences are entered into a 3D look-up table which is used during runtime to transform depth and color information into the application’s world coordinate system. Our proposed method requires a manual effort of less than one minute per RGBD-sensor and achieves a high calibration accuracy with an average 3D error below 3.5 mm and an average texture reprojection error smaller than 1 pixel.