A 256×256 45/65nm 3D-stacked SPAD-based direct TOF image sensor for LiDAR applications with optical polar modulation for up to 18.6dB interference suppression

PubDate: March 2018
Teams: Delft University of Technology;EPFL;TSM
Writers: Augusto Ronchini Ximenes; Preethi Padmanabhan; Myung-Jae Lee; Yuichiro Yamashita; D. N. Yaung; Edoardo Charbon

Abstract
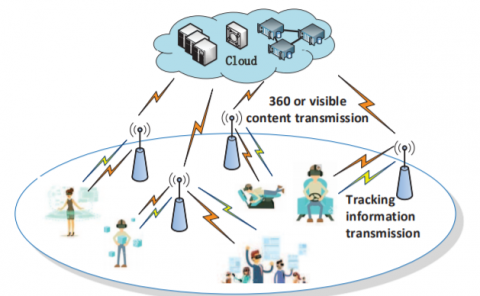
Light detection and ranging (LiDAR) systems based on direct time-of-flight (DTOF) are used in spacecraft navigation, assembly-line robotics, augmented and virtual reality (AR/VR), (drone-based) surveillance, advanced driver assistance systems (ADAS), and autonomous cars. Common requirements are accuracy and speed, while ensuring long operating distance, high tolerance to background illumination and robustness to interference from other LiDAR systems. To meet these demands, the DTOF sensor community has provided numerous architectures, typically making use of resource sharing that often introduces tradeoffs between pixel count and speed. If resource sharing is not used, reduced fill factor, high non-uniformity, and pile-up distortion generally arise, thus limiting overall performance [1].