3D Mapping and 6D Pose Computation for Real Time Augmented Reality on Cylindrical Objects

PubDate: October 2019
Teams: Chinese Academy of Sciences
Writers: Fulin Tang; Yihong Wu; Xiaohui Hou; Haibin Ling
PDF: 3D Mapping and 6D Pose Computation for Real Time Augmented Reality on Cylindrical Objects
Abstract
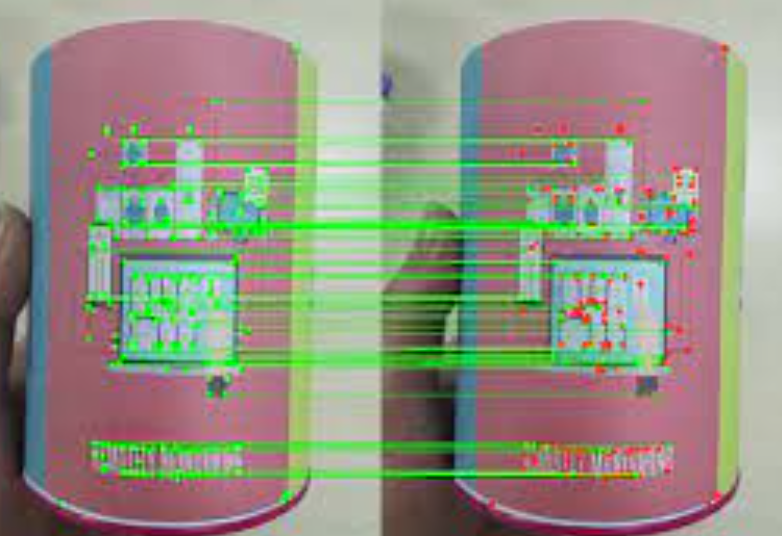
Visual Augmented Reality (AR) typically overlays virtual computer graphics or other virtual contents on the real world videos, attracting much interest from both academic and industrial communities. Although AR techniques on planes are well studied, cylindrical objects are seldom used for augmented reality. In this paper, we propose a new method for 3D reconstruction and 6D pose computation for augmented reality on a cylindrical object. The 6D pose is the relative pose between the camera and the cylindrical object, which is very convenient to make augmented reality. First, we capture some images with a cylindrical object and then reconstruct its 3D model with textures offline by using projective invariance and image contours. Second, according to the 3D model, we track the 6D relative pose between the camera and the cylindrical object online, where we propose a linear P3P RANSAC to remove outliers. Finally, the virtual images are exactly aligned with the cylindrical object in the real world. Experimental results show that the proposed method outperforms the state of the arts in terms of 3D mapping and 6D pose computation on cylindrical objects.
