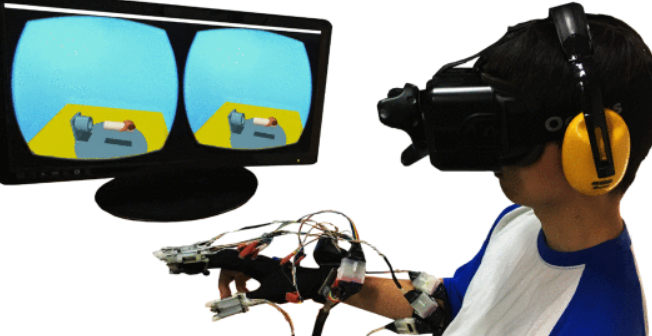
Wearable Finger Tracking and Cutaneous Haptic Interface with Soft Sensors for Multi-Fingered Virtual Manipulation

PubDate: October 2018
Teams: Seoul National University
Writers: Yongjun Lee; Myungsin Kim; Yongseok Lee; Junghan Kwon; Yong-Lae Park; Dongjun Lee
Abstract
Multi-Fingered haptics is imperative for truly immersive virtual reality experience, as many real-world tasks involve finger manipulation. One of the key lacking aspect for this is the absence of technologically and economically viable wearable haptic interfaces that can simultaneously track the finger/hand motions and display multi-degree-of-freedom (DOF) contact forces. In this paper, we propose a novel wearable cutaneous haptic interface (WCHI), which consists of 1) finger tracking modules (FTMs) to estimate complex multi-DOF finger and hand motion; and 2) cutaneous haptic modules (CHMs) to convey three-DOF contact force at the finger-tip. By opportunistically utilizing such different types of sensors as inertial measurement units, force sensitive resistor sensors, and soft sensors, the WCHI can track complex anatomically consistent multi-DOF finger motion while avoiding FTM-CHM electromagnetic interference possibly stemming from their collocation in the small form-factor interface; while also providing the direction and magnitude of three-DOF finger-tip contact force, the feedback of which can significantly enhance the precision of contact force generation against variability among users via their closed-loop control. Human subject study is performed with a virtual peg insertion task to show the importance of both the multi-DOF finger tracking and the three-DOF cutaneous haptic feedback for dexterous manipulation in virtual environment.