3D Object Recognition Method Based on Improved Canny Edge Detection Algorithm in Augmented Reality

PubDate: August 2020
Teams: Northeastern University
Writers: Tianhan Gao; Zhenhao Yang
PDF: 3D Object Recognition Method Based on Improved Canny Edge Detection Algorithm in Augmented Reality
Abstract
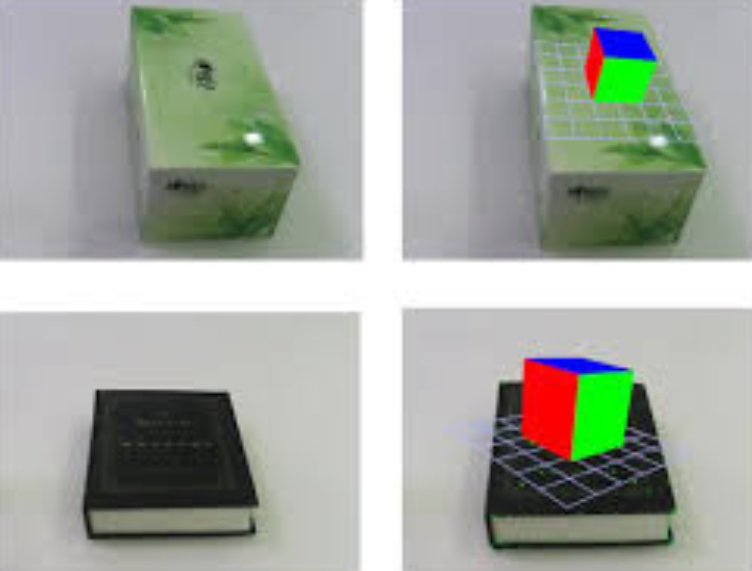
Augmented reality (AR) superimposes computer-generated virtual objects on real scenes to gain immersive experience. Effective recognition of 3D objects in real scenes is the fundamental requirement in AR. The traditional Canny edge detection algorithm ignores the important boundary information about the object, thus decreasing the recognition accuracy. In this paper, we improve Canny to propose a novel 3D object recognition method, where median filtering is adopted in order to extract the contour of the object instead of Gaussian fuzzy. An operator based on wedge template is designed to improve the boundary detection effect of the corner. Local feature descriptors are then introduced to describe the local feature points of the object. Finally, SLAM technology is conducted to ensure that the virtual model is stably superimposed above the 3D object. The experimental results show that the proposed method is able to retain the edge information of the object well and can be combined with local feature descriptors to accurately recognize 3D objects.