Development and Validation of Modeling Framework for Interconnected Tendon Networks in Robotic and Human Fingers

Title: Development and Validation of Modeling Framework for Interconnected Tendon Networks in Robotic and Human Fingers
Teams: Facebook
Writers: Taylor D. Niehues, Raymond J. King, Ashish D. Deshpande, Sean Keller
Publication date: July 24, 2017
Abstract
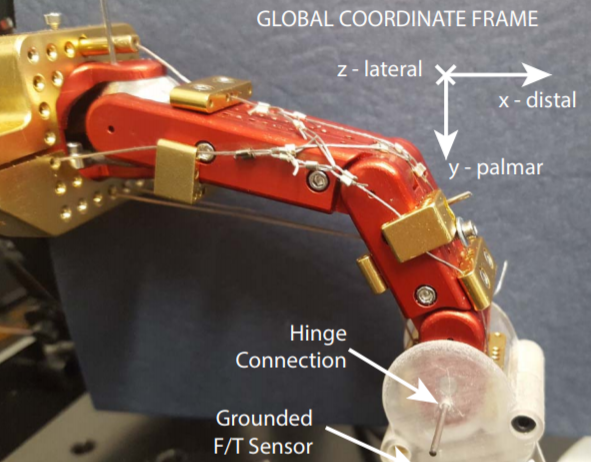
The primary contribution of this work is the development of a generalized modeling methodology for complex tendon systems toward a long-term goal of modeling the mechanical structure of the human finger. The key feature of this model is its ability to predict how muscle forces will transmit through an interconnected tendon network based on tendon kinematics and the current joint posture, so that the transformation from input muscle forces to output joint torques and fingertip forces is accurately represented. The feasibility of this model is evaluated by using a tendon-driven robotic finger testbed. Moreover, we utilize the validated model to explore unique features of the extensor mechanism.